
Proiect:
Dezvoltarea unui concept inovativ de UAV hibrid cu aplicații în combaterea încălzirii globale
Prezentare generală
Acronim: ENFORCING
Domeniu de specializare: Energie, mediu și schimbări climatice
Director de proiect AUTONOMOUS FLIGHT TECHNOLOGY R&D SRL: Liviu ISACHE
E-mail Director de proiect: liviu.isache@aft.ro
Responsabil proiect INCDT COMOTI: Tiberius FRIGIOESCU
E-mail responsabil de proiect: tiberius.frigioescu@comoti.ro
Data începerii contractului: 21.06.2022
Data încheierii contractului: 20.06.2024
Valoarea totalâ a Contractului: 1.354.671,00 lei
Autoritatea Contractantâ: Unitatea Executivă pentru Finanţarea Învâţâmântului Superior, a Cercetării, Dezvoltării şi Inovării
Rezumatul proiectului
Proiectul presupune dezvoltarea unui concept inovativ de UAV hibrid, de tip avion cu sistem de decolare/aterizare verticală specific unui quadcopter cu aplicații în combaterea încălzirii globale. În prezent, încălzirea globală este un fenomen îngrijorător ce nu poate fi oprit. Studiile arată că în ultimele patru decenii temperatura a crescut din ce în ce mai mult, această tendință ascendentă fiind înregistrată încă din anii 1850. Printre numeroasele cauze ale încălzirii globale se numără și creșterea gradului de poluare, defrișarea pădurilor și supraexploatarea pășunatului. UAV-ul are integrați senzori ultra moderni pentru interceptarea și localizarea zgomotului produs de către echipamentele de tăiere a arborilor din păduri si un sistem de monitorizare video și senzori de captare a datelor meteorologice. Optimizând sistemul hibrid de zbor împreună cu configurația aerodinamică a aripii, UAV-ul va avea o autonomie de zbor mare, versatilitatea completă a unui quadcopter și randamentul de zbor complet al unui avion, caracteristici optime pentru îndeplinirea misiunii acesteia. Obiectivul general al proiectului este de a alinia cercetările din România, în domeniul Energie, mediu și schimbări climatice, subdomeniul Mediu și schimbări climatice la nivelul celor din țările europene dezvoltate. Atingerea scopului proiectului va conduce la creșterea competitivității agentului economic AFT R&D prin asimilarea rezultatelor CDI și transferul acestora pe piață. În același timp, se va îmbunătății expertiza COMOTI din domeniul UAV-urilor și sistemelor electronice programabile.
Obiectivul proiectului
Obiectivul general al proiectului este de a alinia cercetările din România, în domeniul Energie, mediu și schimbări climatice, subdomeniul Mediu și schimbări climatice la nivelul celor din țările europene dezvoltate. Atingerea scopului propunerii de proiect va conduce la creșterea competitivității agentului economic AFT R&D prin asimilarea rezultatelor CDI și transferul acestora pe piață.
Modelul experimental dezvoltat va lărgi domeniul de utilizare al UAV-urilor dezvoltate de AFT R&D, atât ca produs cât și ca serviciu și va întări poziția sa pe piața națională și ulterior pe cea internațională pe care activează. În același timp, se va îmbunătății expertiza COMOTI din domeniul UAV-urilor și sistemelor electronice programabile. Scopul și obiectivul general al proiectului vor fi atinse odată cu îndeplinirea obiectivelor specifice (OS):
- OS1: Dezvoltarea modelului experimental de UAV din materiale avansate pe bază de compozite polimerice ranforsate cu fibre, materiale fabricate prin tehnologii convenționale și tehnologii avansate (fabricație aditivă cu fibre continue și matrici polimerice). Acest obiectiv va fi atins prin realizarea componentelor aeronavei ultra-ușoare având în vedere experiența atât a angajaților AFT R&D în domeniul UAV-urilor și materialelor compozite, dar și experiența cercetătorilor de la COMOTI în domeniul compozitelor și tehnologiilor de fabricație avansate;
- OS2: Montarea sistemului de motorizare și a echipamentelor electronice conform design-ului prestabilit și a reglementărilor în vigoare formulate de către EASA (European Union Aviation Safety Agency);
- OS3: Realizarea programului de interceptare a sunetului produs de defrișarea copacilor. Pentru interceptarea și localizarea zgomotului se vor utiliza microfoane acționate de sistemul de operare al UAV-ului, iar cu ajutorul limbajului de programare Python se vor realiza liniile de cod ce vor permite localizarea sursei zgomotului și direcția acesteia. UAV-ul va realiza capturi de imagine cu zona în care au loc defrișările și le va trimite autorităților de control în vederea verificării legalității acțiunii;
- OS4: Evaluarea performanțelor motoarelor pe stand și determinarea frecvențelor elicelor în vederea optimizării acestora și a reducerii zgomotului pentru a nu afecta ecosistemul în timpul survolării. Pentru creșterea acurateței datelor experimentale, frecvența elicelor va fi eliminată din programul de interceptare a zgomotului;
- OS5: Verificarea funcționării modelului experimental de UAV din punct de vedere electronic;
- OS6: Verificarea structurii stabilității în zbor și a pilotului automat ale modelului experimental de UAV;
- OS7: Validarea modelului exprimental de UAV și a misiunii acestuia în mediu relevant (domeniul silvic);
- OS8: Analiza și interpretarea rezultatelor, determinarea unor direcții viitoare de cercetare și posibilități pentru îmbunătățire a nivelului de maturitate tehnologică a modelului exprimental de UAV.
Prezentare detaliată
Proiectul presupune dezvoltarea unui concept inovativ de UAV hibrid, de tip avion cu sistem de decolare/aterizare verticală specific unui quadcopter cu aplicații în combaterea încălzirii globale. În prezent, încălzirea globală este un fenomen îngrijorător ce nu poate fi oprit. Studiile arată că în ultimele patru decenii temperatura a crescut din ce în ce mai mult, această tendință ascendentă fiind înregistrată încă din anii 1850. Printre numeroasele cauze ale încălzirii globale se numără și creșterea gradului de poluare, defrișarea pădurilor și supraexploatarea pășunatului. UAV-ul are integrați senzori ultra moderni pentru interceptarea și localizarea zgomotului produs de către echipamentele de tăiere a arborilor din păduri si un sistem de monitorizare video și senzori de captare a datelor meteorologice. Optimizând sistemul hibrid de zbor împreună cu configurația aerodinamică a aripii, UAV-ul va avea o autonomie de zbor mare, versatilitatea completă a unui quadcopter și randamentul de zbor complet al unui avion, caracteristici optime pentru îndeplinirea misiunii acesteia. Obiectivul general al proiectului este de a alinia cercetările din România, în domeniul Energie, mediu și schimbări climatice, subdomeniul Mediu și schimbări climatice la nivelul celor din țările europene dezvoltate. Atingerea scopului proiectului va conduce la creșterea competitivității agentului economic AFT R&D prin asimilarea rezultatelor CDI și transferul acestora pe piață. În același timp, se va îmbunătății expertiza COMOTI din domeniul UAV-urilor și sistemelor electronice programabile.
Rezultate estimate
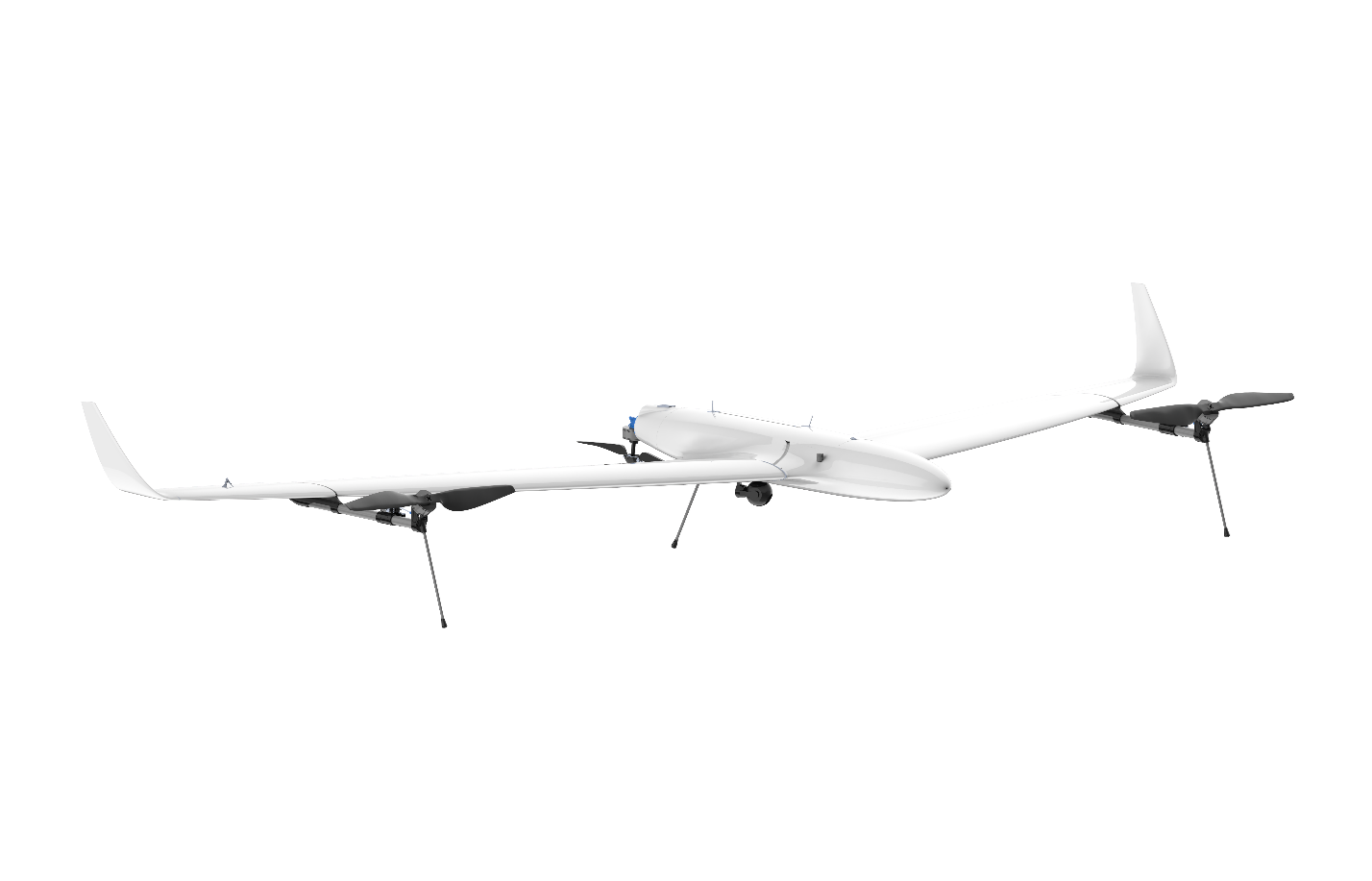
În cadrul proiectului se va dezvolta un model experimental de aeronavă fără pilot la bord (UAV – unmanned aerial vehicle) de tip avion cu sistem de decolare/aterizare verticală specific unui quadcopter, sistem ce are rolul de a crește autonomia aeronavei. Aeronava este proiectată pentru misiuni de interceptare a zgomotului produs de echipamentele de tăiere a arborilor din păduri (motoferăstrău, graifer cu ferastrău), în vederea localizării și verificării legalității defrișării. De asemenea, misiunea secundară a aeronavei va fi monitorizarea meteorologică a zonei survolate.
Rezultatele proiectului constau în:
- Dezvoltarea unui model experimental de UAV cu aripă fixă și sistem VTOL
- Dezvoltarea unui program de interceptare a zgomotului produs de echipamentele de tăiere a arborilor din păduri
- Dotarea UAV-ului cu senzori de captare date metereologice
- Structura să fie realizată din materiale avansate pe bază de compozite polimerice ranforsate cu fibre, materiale fabricate prin tehnologii convenționale și tehnologii avansate
- Testarea sistemului de propulsie al UAV-ului pe stand și în camera anecoică în vederea eliminării zgomotelor proprii din cadrul programului de interceptare de zgomot
- Viteza de croazieră a UAV-ului să fie de aproximativ 50 km/h
- Autonomia de zbor să fie de minim 3 ore în modul avion
Consorțiu proiect
Coordonator: AUTONOMOUS FLIGHT TECHNOLOGY R&D SRL
Director proiect: Liviu ISACHE liviu.isache@aft.ro
Partener 1: INCDT COMOTI
Responsabil proiect: Tiberius FRIGIOESCU tiberius.frigioescu@comoti.ro
Etape, livrabile
Etapa 1 - Proiectarea modelului experimental
Rezultate etapa 1:
- Raport privind proiectarea modelului experimental și definirea caracteristicilor acestuia.
- Selecție componente electronice și materiale.
- Realizare pagină web
- Definire performanțe necesare model experimental. Proiectare model experimental.
Etapa 2 - Fabricarea modelului experimental și dezvoltarea elementelor software
Rezultate etapa 2:
- Raport privind testarea materialelor
- Raport privind fabricația modelului experimental
- Raport privind instalarea componentelor electronice și verificarea acestora
- Raport privind dezvoltarea și validarea elementelor software ale modelului experimental
- Publicație științifică/ participare conferință/ workshop/ congress
- Fabricarea structurii modelului experimental.
- Asamblare structură model experimental
- Validare rezistență mecanică prin testare epruvete.
- Fabricare aditivă componente de legătură. Asamblare
- structură model experimental
- Montare sistem motorizare pe modelul experimental.
- Montare echipamente electronice. Testare la sol a comenzilor.
- Analiză aeroacustică asupra echipamentelor de tăiere arbori.
- Dezvoltare în Python a programului de interceptare sunet. Implementare program de interceptare pe computerul modelului experimental
- Publicare articole.
- Depunere cerere brevet.
Etapa 3 - Validarea modelului experimental
Rezultate etapa 3:
- Raport privind validarea modelului experimental în condiții relevante de funcționare
- Publicație științifică/ participare conferință/ workshop/ congress
- Programare pilot automat pe modelul experimental. Testare la sol a modelului experimental. Testare în zbor a modelului experimental.
- Actualizare pagină web
Rezultate
Etapa 1
-
Raport privind proiectarea modelului experimental și definirea
caracteristicilor acestuia.
-
Selecție componente electronice și materiale.
-
Realizare pagină web
-
Definire performanțe necesare model experimental. Proiectare model experimental.
Modelul CAD
Etapa 2
-
Raport privind testarea materialelor, fabricația modelului
experimental, instalarea componentelor electronice și verificarea
acestora, dezvoltarea și validarea elementelor software ale modelului
experimental.
-
Fabricarea structurii modelului experimental.
-
Asamblare structură model experimental.
-
Validare rezistență mecanică prin testare epruvete.
-
Fabricare aditivă componente de legătură.
-
Asamblare structură model experimental
-
Montare sistem motorizare pe modelul experimental.
-
Montare echipamente electronice. Testare la sol a comenzilor.
-
Analiză aeroacustică asupra
echipamentelor de tăiere arbori.
-
Dezvoltare în Python a programului de
interceptare sunet. Implementare program de interceptare pe computerul
modelului experimental
-
Depunere cerere brevet A/00305 intitulat APARAT DE ZBOR
FĂRĂ PILOT CU ARIPĂ FIXĂ, CU SISTEM DE DECOLARE/ATERIZARE
VERTICALĂ, CU SISTEM DE PROPULSIE TRI-ROTOR ȘI METODĂ DE
INTERCEPTARE A SUNETULUI SPECIFIC EMIS DE MOTOFIERĂSTRĂU CU MOTOR
TERMIC
-
Participare conferință International Scientific
Conference Forest Science
for people and societal challenges – The 90th Marin Drăcea
INCDS Anniversary cu lucrarea intitulată A Study on the Development
of an UAV as a Solution to Fight Illegal Deforestation

UAV-ul dezvoltat
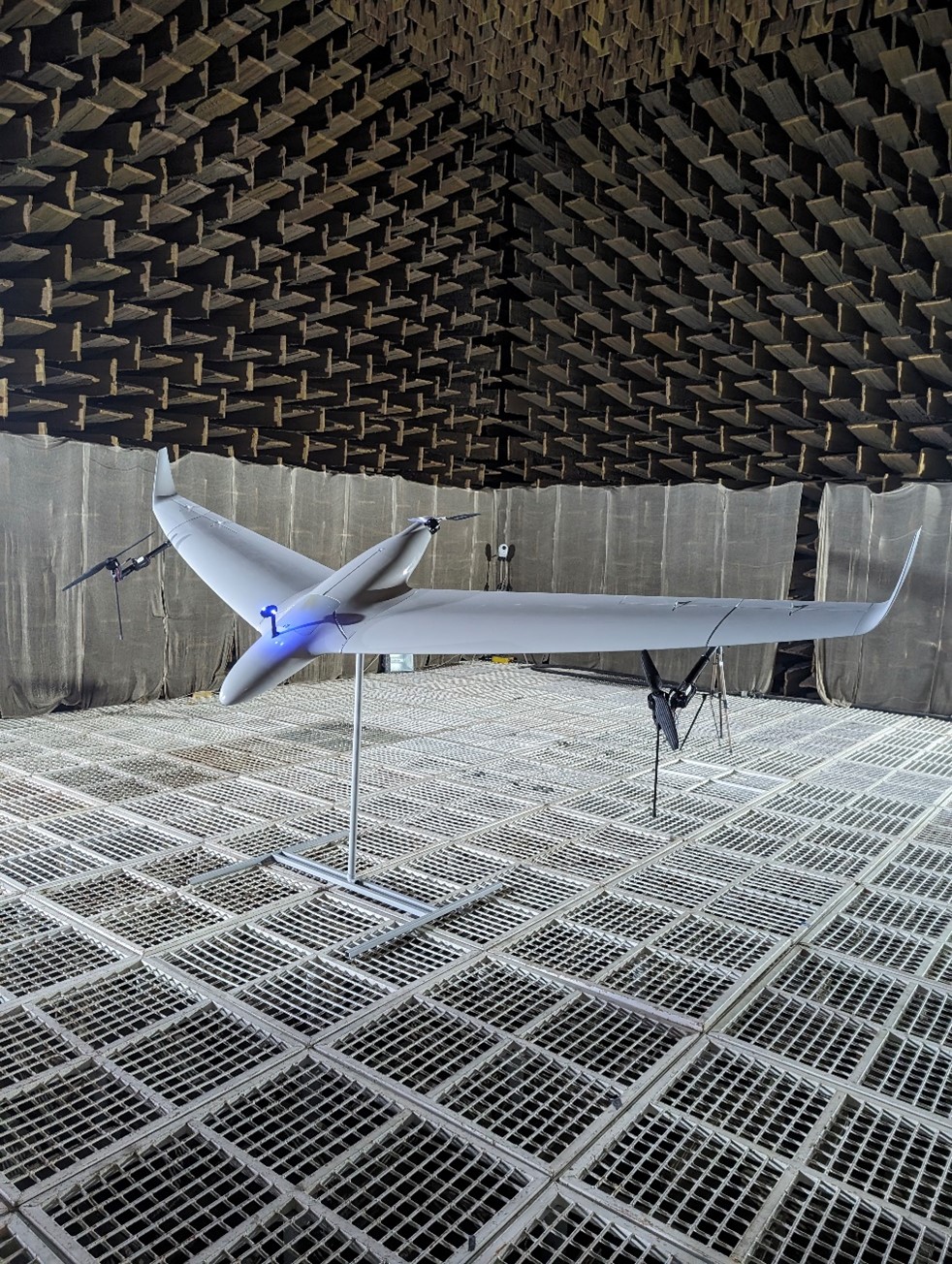
UAV-ul în camera anecoică din dotarea INCD TURBOMOTOARE COMOTI
Etapa 3
-
Raport privind validarea modelului experimental în condiții relevante de funcționare
-
Programare pilot automat pe
modelul experimental
-
Testare la sol a modelului experimental
-
Testare în zbor a modelului
experimental
-
Publicare articol: Badea, G.P.; Frigioescu,
T.F.; Dombrovschi, M.; Cican,
G.; Dima, M.; Anghel, V.; Crunteanu, D.E. Innovative
Hybrid UAV Design, Development, and Manufacture for Forest Preservation and
Acoustic Surveillance. Inventions 2024, Vol. 9, Issue 39. https://doi.org/10.3390/inventions9020039
.

UAV-ul ENFORCING în zbor la punct fix și cu sistem de detecție activat

UAV-ul ENFORCING în zbor la punct fix deasupra pădurii

UAV-ul ENFORCING în zbor la punct fix
Cu mult respect,
Echipa AFT
10-Iunie-2024